





What makes Tormach CNC machines different?
Tormach makes CNC machines and automation tools that are capable, affordable, and easy-to-use.
Our full line runs on single-phase power and includes our free and open-source control software called PathPilot®.

Grow Over Time
Tormach machines are designed to be upgradable and self-serviceable so your machine can grow as your business or needs change. Get started with one of our standard packages and add things like automatic tool changing or a 4th axis when you're ready.

True Ownership
When you buy a Tormach it's all yours - no service contracts or software lockouts. The only limit to what you do with your Tormach machine is your imagination. Install and maintain yourself or get help from our support and services team - it's entirely up to you.

US-Based Support
From choosing the right machine configuration to buy, to help finding a replacement part 5 years later, our US-based pre-sales and technical support teams are here to assist every step of the way.
CAPABLE CNC MACHINES
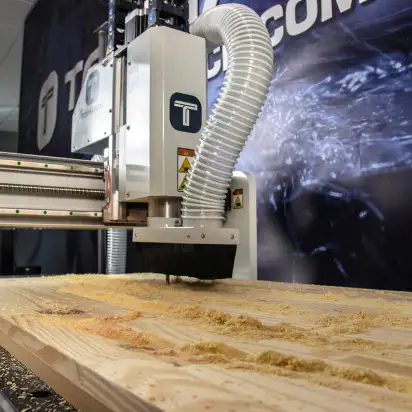
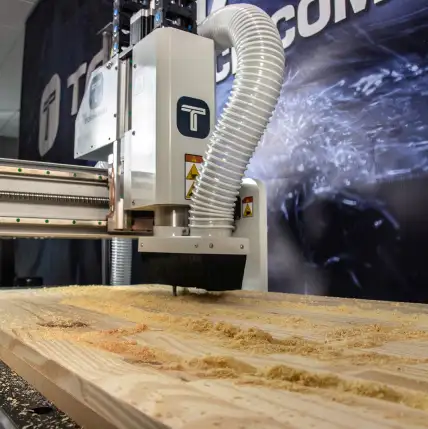
Tormach makes CNC machines and automation tools that offer precision across a range of materials, without the need for expensive industrial three-phase power. Our machines cut wood, plastics, aluminum, steel, and titanium.
Talk to an experienced US-based machinist about your project for advice on the best machine for the job.




AFFORDABLE CNC MACHINES
Tormach machines are designed to be upgradable, so they can grow with you and your budget over time. And unlike others in the industry, Tormach customers have true ownership of their machines. No service contracts or software lockouts.
“The benefits people don’t often realize with Tormach is their AWESOME tech support and the ability of equipment self-repair.” - Larry’s Machine Shop
EASY-TO-USE
Tormach’s control software, PathPilot®, is free, open-source, easy to learn, and includes free updates for life. If you’re new to CNC or new to PathPilot, you can get up to speed with our virtual PathPilot HUB. All you need is a free account and an internet connection.
Learn more and try PathPilot® Hub today.
Customers Include
Tormach's CNC machines and automation tools are are used by customers large and small around the world.




#MadeWithTormach
FEATURED ARTICLES
How-to articles, business case studies, customer stories, and project ideas to help you improve your CNC skills or build a business!

Getting Started With Your Tormach CNC Mill: a Beginner's Guide

Prototyping Motorcycle Suspension Systems Makes Business Sense With a Tormach CNC Mill
