

Tormach software engineer Brandon Duarte will walk you through the exciting new features in the latest PathPilot® software update for the ZA6 industrial robot. These user-friendly updates will enhance your programming and operation experience.
Precise Arm Configuration Control
Enhanced control over the ZA6 industrial robot's arm configuration gives you the ability to dictate specific arm orientations during movement. By implementing arm constraint configurations, users can ensure the robot moves through space with precision, a crucial aspect in scenarios like machine tending. This feature aims to provide users with a fine level of detail and control over the robot's behavior, fostering safer and more efficient operations.
Our overview video below showcases the new arm constraint configurations in action, showcasing how defining specific arm orientations at waypoints influences the robot's movement. This becomes particularly valuable in use cases where meticulous control over the robot's spatial behavior is essential.
One of the more interesting aspects of these updates is the simplicity of implementing arm configurations directly in the code using Python. For additional information, you can visit our Python robot programming language page.
Revamped Robot Preview Window
PathPilot's user interface receives a facelift, with an introduction to the new look and feel of the robot preview window. Improved aesthetics and the addition of a grid contribute to enhanced spatial awareness. User feedback played a pivotal role in refining the jog panel's appearance, providing a clearer distinction between the robot's current and target jog positions.
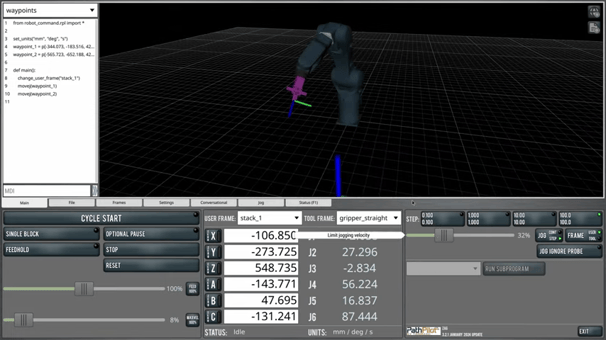
Waypoint Preview
A standout feature introduced in the robot preview window is the waypoint preview functionality. Users can now visualize program and global waypoints directly within the preview window. This not only aids in understanding the robot's movement in space but also serves as a valuable debugging tool. The video demonstrates how users can easily identify and rectify misplaced waypoints directly in the code.
'Run Subprogram' Functionality
PathPilot introduces a 'Run Subprogram' button, allowing users to take specific actions defined in their loaded program and run them independently. This feature proves especially useful when dealing with large and complex robot programs. Users can now test or execute individual actions without the need to break down the program into separate files, streamlining the development process.
Improved Program Interpreter
The program interpreter now automatically pulls in dependencies as changes are made, eliminating the need for manual reloading. This efficiency improvement saves users time and effort when working with intricate robot programs, making the overall programming experience smoother.
Emergency Stop with Escape Key
A minor yet impactful addition is the ability to stop robot motion using the escape key. This quick and intuitive command enhances overall safety during operation, providing users with an additional layer of control.